柔性自振荡致动器的最新研究进展
第一作者:李晶晶 武汉纺织大学
通讯作者:夏治刚 武汉纺织大学
周 湘 中国药科大学
刘遵峰 南开大学
【文章推荐语】
自振荡致动器能够在恒定外界刺激下自主产生弯曲、旋转等机械运动,而不需要人为控制刺激源,并在自主软机器人、可持续自发能量转换设备等领域具有巨大应用前景。本文详细介绍了自振荡致动器的驱动机制,包括自振荡化学反应和自遮蔽效应导致的机械负反馈回路;并从材料种类、刺激源类型、形状尺寸和应用四个方面详细介绍了自振荡致动器的研究进展。本文最后指出了当前自振荡致动器面临的挑战和发展前景,将为科研工作者提供有价值的研究方向。
【亮点介绍Highlight】
1.系统总结了自振荡致动器的驱动机理和在不同光源刺激下的振荡。
2.全面描述了自振荡致动器在材料种类、刺激类型、尺寸和应用方面的研究进展。
【引言】
自振荡致动器可以在外部恒定刺激下产生连续机械运动,大大降低驱动系统的复杂性,并在自主软机器人、自主智能设备、自清洁涂料等智能领域显示出潜在的应用。当前文章主要系统综述了自振荡凝胶系统的研究进展。而关于自振荡柔性智能材料最新进展的报道极少。本文综述了柔性自振荡致动器的最新研究进展(图1)。首先详细讨论了自振荡致动器的振荡机理(振荡化学反应和自遮蔽效应等)和在不同光源(激光、发散光和太阳光)类型下的振荡。全面描述了自振荡致动器在材料种类(液晶聚合物、水凝胶和其他复合物等)、刺激源类型(光、热和湿气等)、形状尺寸(薄膜、纤维、块状和 3D 折纸)和应用(自主软机器人和能量转换设备等)四个方面的研究进展。最后,文章概述了自振荡致动器未来发展面临的挑战和前景。例如,未来的工作应侧重于增强振荡性能,并制造具有多种尺度的太阳光或多重刺激响应振荡器,使振荡器应用于更多领域。此外,未来可通过采用仿生分层结构和生物材料,施加周期性电压或磁场,或利用高弹性材料内部的弹性周期性变化,开发新的自振荡驱动机制。
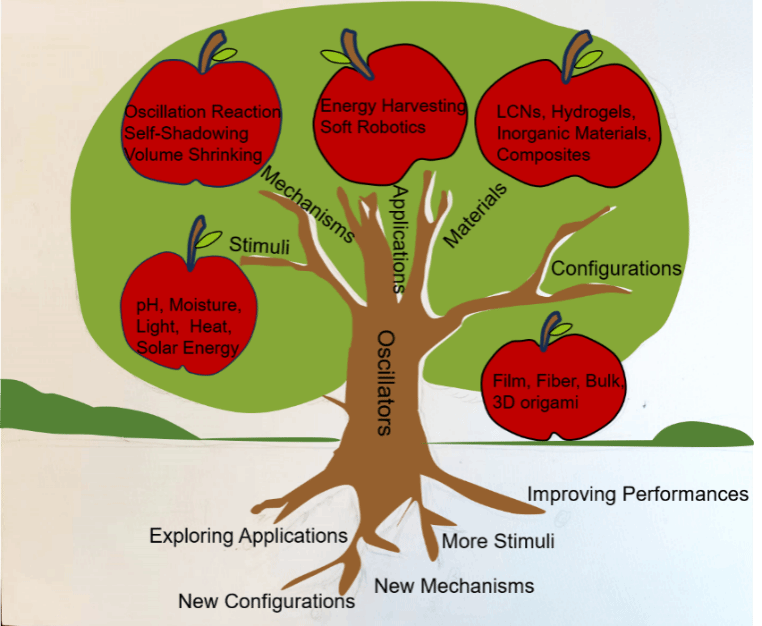
图 1. 柔性自振荡致动器的研究现状和挑战
【本文内容简介】
1. 不同光源刺激下自振荡致动器的振荡机理
(1)激光
激光或光束可以精确控制致动器的照明区域和致动方向。激光响应致动器在激光照射下由于不对称体积变化发生弯曲,使致动器远离激光源和致动器冷却、体积迅速恢复来实现自振荡。例如,He等人开发了一种基于金纳米粒子-PNIPAm水凝胶的激光驱动自振荡致动器(图2a)。PNIPAm是一类热敏水凝胶,它可以在分别低于或高于临界溶解温度(LCST)的环境温度下产生体积溶胀和收缩。金纳米粒子可以将吸收的光能转化成局部热能,使水凝胶柱产生温度梯度,产生不对称,并向下弯曲。当水凝胶与光线平行时,凝胶局部冷却,体积溶胀,向上弯曲。基于光自遮蔽效应诱导的负反馈和交替温度变化(图2b),该致动器可实现自主振荡运动。
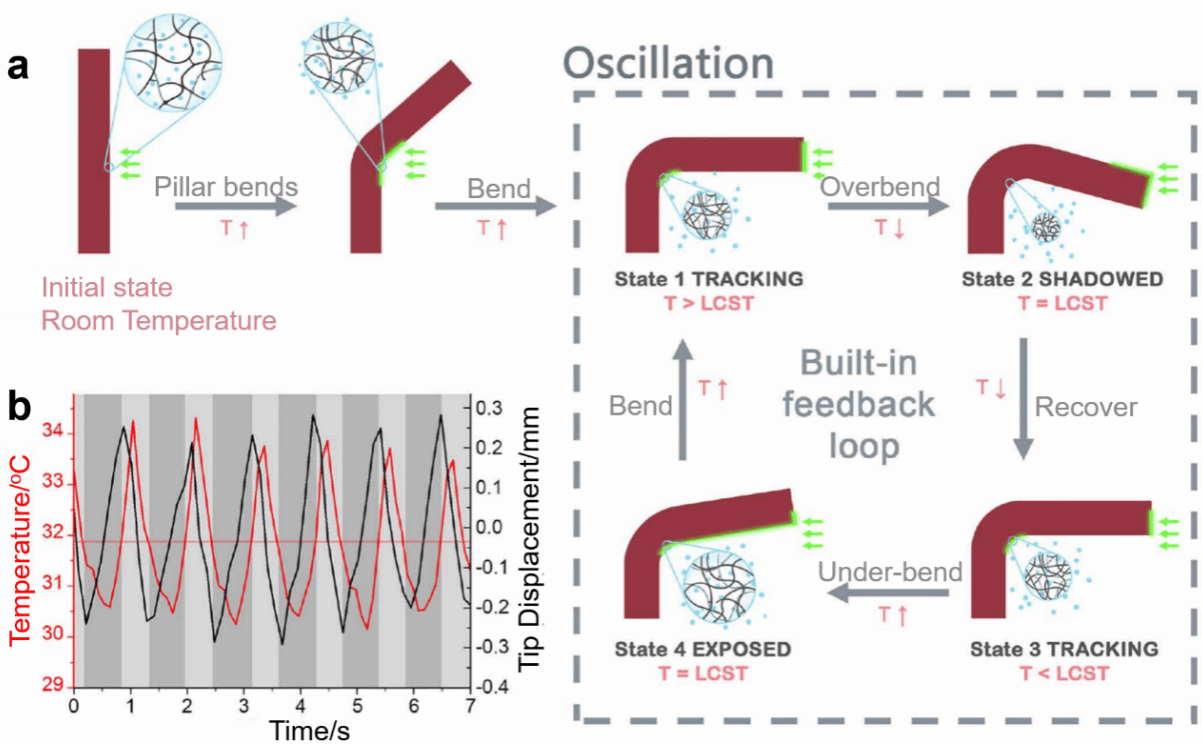
图2. 激光刺激下的自振荡致动器(a)自振荡驱动机理,(b)振荡温度、位移与时间关系曲线
(2)发散光
当前难以通过遮蔽发散光来实现自振荡。Liu等人基于多孔聚丙烯薄膜在近红外发散光下的光热溶剂蒸发和吸附衍生的交替体积膨胀和收缩实现了自振荡运动(图3a)。在800 mW cm-2的近红外光照射下,致动器产生微小波动,直至薄膜内部溶剂吸脱附达到平衡时,产生稳定的左右弯曲振荡(图3b)。振荡周期约为0.3秒获得的振荡位移为15.7mm。特别地,在溶剂连续供应和恒定的光照下,振荡运动永远不会停止。
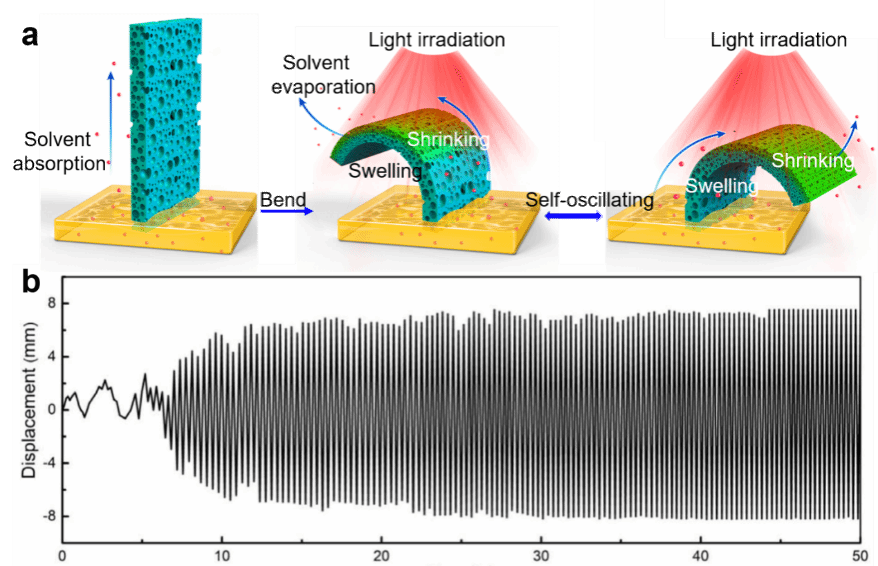
图3. 发散光刺激下的自振荡致动器(a)振荡驱动机理,(b)振荡位移和时间关系曲线。
2. 自振荡致动器的构筑材料
(1)水凝胶
利用自遮蔽效应导致的机械负反馈回路,水凝胶可实现自振荡。如图4a,Yin等人设计了PI/Fe3O4-Cu纳米棒-PAM/ PDMS三层复合膜致动器。Fe3O4-Cu纳米棒用于实现光能到热能的转化,PAM水凝胶吸收水分子以产生体积膨胀。在光不断照射下,基于PDMS大的热膨胀系数,薄膜向PI侧弯曲。此外,局部的高温导致水分子蒸发并在PDMS和PAM之间产生气泡,使薄膜恢复到不平衡状态。当蒸汽被释放出来,致动器再次返回到初始平衡状态。此外,通过对水凝胶进行修饰,可以实现多模式振荡。基于相同机理,含有不同螺吡喃衍生物水凝胶可产生不同振荡变形(图4b,c)。
图4. 水凝胶自振荡致动器(a)光热蒸汽驱动的水凝胶致动器的振荡机制
(b,c)SP水凝胶在蓝光持续照射下的振荡运动示意图
(2)液晶聚合物
液晶聚合物具有各向异性、可调弹性和高模量等特点,是实现振荡运动的最受欢迎的材料。如Guo等人设计了一个具有宏观交替向列(N)和各向同性(I)的LCN致动器(图5a)。LCN用作热机械载体,而GO起光热转换剂的作用。在光照射下,液晶在N相中的取向发生了变化,并向N相面弯曲。冷却后,该区域恢复到原始状态,从而实现自振荡(图5b)。Yang等人在LCN薄膜上部分沉积聚多巴胺光热层,当薄膜被NIR光照射时,PDA涂层薄膜弯曲,而没有PDA涂层的薄膜阻挡光照射,使弯曲的薄膜恢复到其原始状态原始形状(图5c)。因此,基于PDA分子的光吸收和自遮蔽效应,自振荡驱动产生。
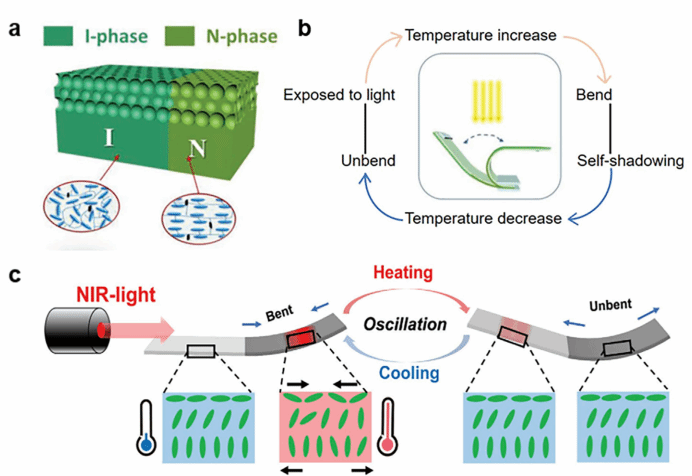
图5. 液晶自振荡致动器(a,b)LCN薄膜振荡机理,(c) PDA-LCN薄膜在近红外光下的振荡原理
(3)其他复合物
除了水凝胶和 LCN 之外,其他复合材料如 PVDF-GO等也是构建自振荡致动器有前途的候选者。Liu等人设计了一种基于墨水/聚对苯二甲酸乙二醇酯/丙烯酸/低密度聚乙烯复合薄膜的光热薄膜致动器。利用光照下薄膜重心可逆移动实现振荡运动(图 8a)。Ho等人基于 PVDF 和 PDA 修饰的 rGO(PDG)和 CNT 设计了一种双层致薄膜动器。其受热产生机械变形,当遇到冷空气时,产生左右弯曲,继而产生重心的移动。通过调节弯曲变形和连续的自主重心移动建立了自锁热机械反馈回路,从而通过交替的加热/冷却实现自主振荡。
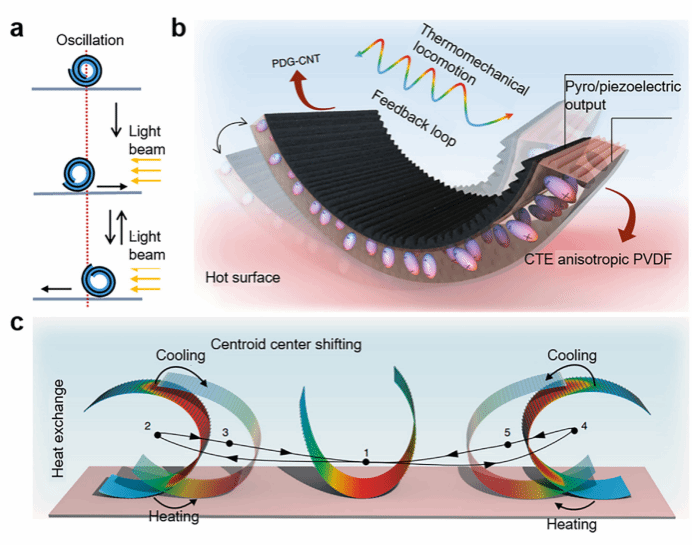
图6. 复合材料基振荡致动器(a)基于油墨/PET/丙烯酸/PE致动器的振荡运动,
(b,c)基于PDG-CNT/PVDF致动器的热-机-电转换设计理念及振荡过程中热变化与重心移动
3. 自振荡致动器的结构尺寸
(1)纤维
纤维材料在智能纺织品、能量收集器等方面具有潜在应用。基于天然纤维或合成纤维(水凝胶纤维、LCE 纤维和其他高分子复合纤维),目前已开发了一系列纤维致动器。然而,大多数致动器可以通过手动控制外部刺激的开/关,很难在持续刺激下实现自振荡运动。Cai 等人设计了一种具有多畴状态的振荡 LCE 纤维。当纤维被加热到相变温度以上,它就会收缩以远离热源。纤维随之冷却又恢复到初始长度,继而产生上下伸缩振荡(图 7a,b)。Lv 等人设计了一种GO 掺杂自缠绕LCE 纤维,其可以在光刺激下产生机械形变。该纤维通过周期性移出和进入光照区域产生振荡。
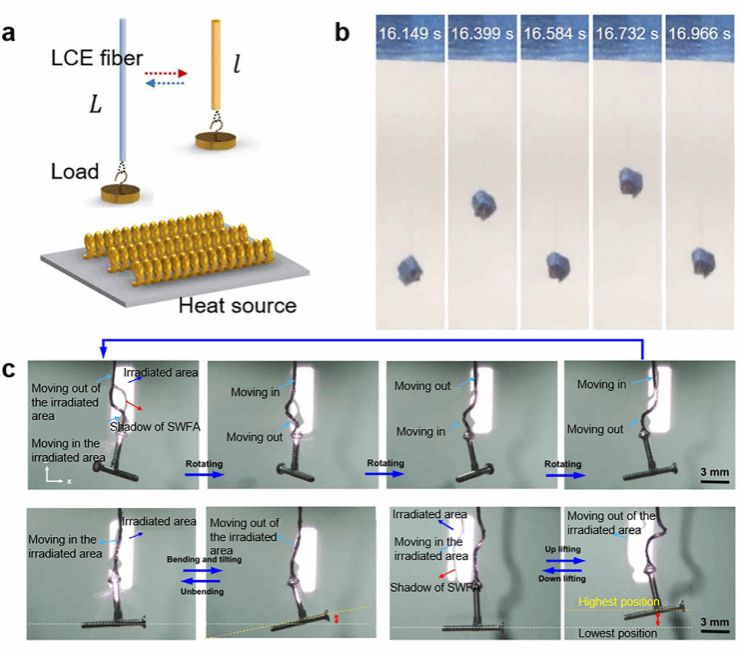
图7. 纤维基振荡致动器(a,b)LCE纤维在稳定温度场下的自振荡,(c)GO-LCE纤维多模式自振荡
(2)3D折纸结构
受古代折纸艺术的启发,利用折纸/剪纸工艺可设计刺激响应型柔性致动器。Kotikian 等人利用LCE的相转变和温度梯度产生推力这一原理设计了一种自推进软机器人,且该机器人能够以13 mm s-1 的平均速度向前自主滚动。
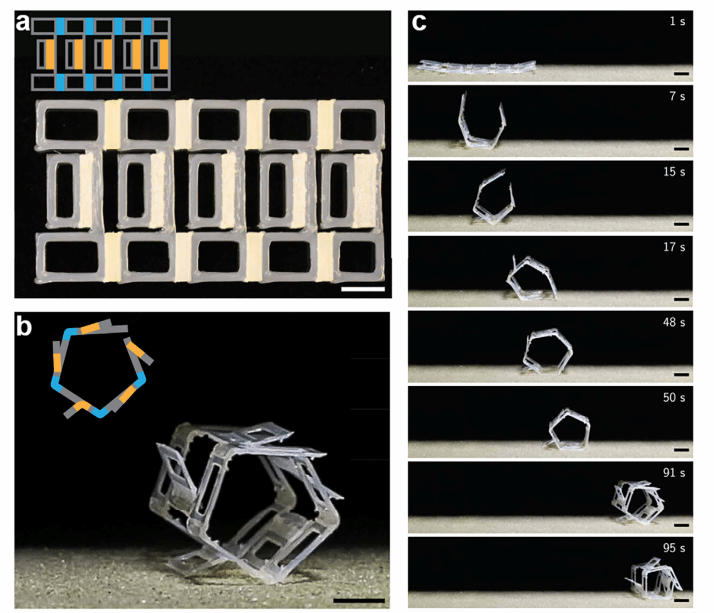
图8. 折纸基自振荡致动器(a-c)自主推进机器人的设计及自主运动
4. 自振荡致动器的应用
(1)软体机器人
自主软体机器人未来可应用于工业生产或生活中如自动清洁、自动生产线等。通过对自振荡致动器进行合理结构和形状设计,可实现软体机器人自主机械运动。如Maeda利用B-Z振荡反应实现水凝胶在棘轮基板上连续向前运动(图9a)。Hu等人设计了拱形BP-CNT/纸薄膜,利用自遮蔽效应实现了连续自主向前爬行运动(图9b)。He利用AuNPs-PNIPAm水凝胶在可见光照射下的自振荡机械变形,实现了在水中的自主游泳运动(图9c)。
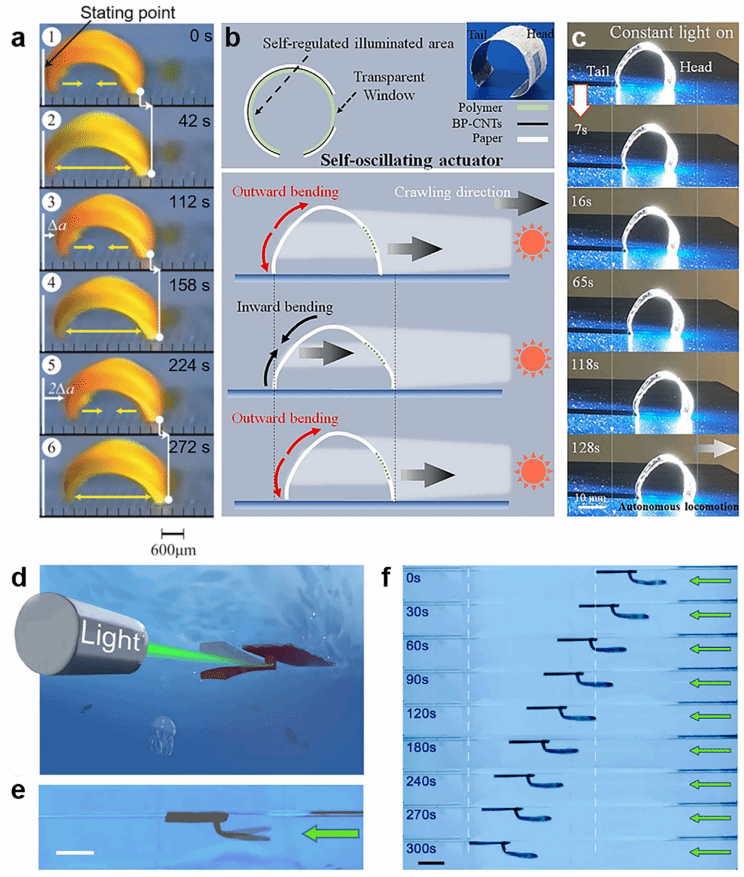
图9. 自振荡致动器在软机器人领域应用(a)水凝胶基自行走软体机器人,
(b,c)基于 BP-CNT/纸质薄膜的自主爬行致动器,(d-f)自主游泳软体机器人
(2)能量转换装置
基于致动器在恒定外部刺激下的自振荡运动,通过将自振荡薄膜/纤维与压 PVDF 层结合或将薄膜放置在摩擦电系统上,可实现连续发电。例如,Yu 等人将LCA 薄膜和 LDPE 薄膜复合设计了一种薄膜致动器。通过利用紫外线下的弯曲响应和自遮蔽效应,实现了感应线圈的连续弯曲运动和振荡,从而连续可产生约 1.5 mV 的交流电压。
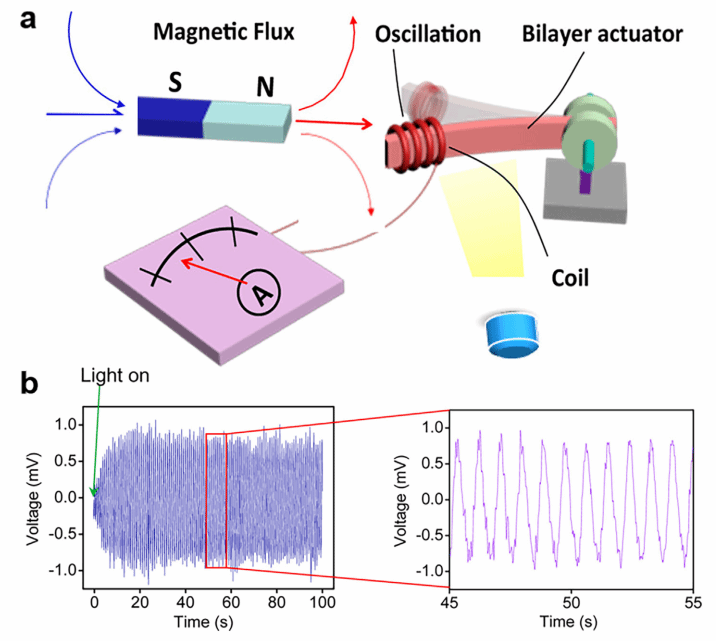
图10. 自振荡致动器的能量转换应用(a,b)发电机原理和自振荡致动器在光持续照射下的连续电输出
【本文结论】
本文总结了自振荡致动器的驱动机理,并详细描述在不同光源刺激下的振荡机制。自振荡致动器在材料种类、刺激类型、尺寸和应用方面的研究进展。尽管自振荡执行器取得了重大进展,但实际应用仍具有挑战性。
1.未来需采用新的振荡机制、合理的材料选择和新颖的结构设计来开发多刺激响应型自振荡致动器。
2. 实现具有大且可控驱动幅度的太阳光驱动自振荡执行器。
3. 仍需通过特殊的形状和尺寸设计以及合理材料性能的优化来进一步提高致动器的振荡性能。
4. 纤维基的振荡器极少报道,限制了在智能纺织、航空航天等领域的应用。
【作者简介】

李晶晶,武汉纺织大学,讲师,湖北省青年科技人才晨光托举计划入选者。主要从事薄膜基人工肌肉的研究,以第一作者或通讯作者在Nat. Commun., Adv. Funct. Mater.等权威期刊上发表学术论文10余篇,授权发明专利4项,主持国家自然科学基金青年项目1项,湖北省青年科技人才晨光计划项目1项,南开大学先进能源材料化学教育部重点实验室开放课题1项等。

夏治刚,武汉纺织大学,教授。主要从事纤维及其集合体成形新技术、纺纱新技术及装备研究。主持国家工业和信息化部智能制造新模式应用项目-子课题1项、国家自科基金2项、湖北省自然科学基金2项,在“Science”、“Advanced Functional Materials”、“Composite Part B:Engineering”、“ACS Applied Materials & Interfaces”、“纺织学报”等杂志上发表学术论文30篇以上,授权美国发明专利5项,授权中国发明专利60项以上。获湖北省科技发明一等奖、安徽省科技进步二等奖、中纺联科技进步二等奖、湖北省科技进步三等奖等。

周湘,中国药科大学,副教授,主要从事新型智能生物医用高分子材料的研究,在Nat. Commun. Adv. Mater. Adv. Funct. Mater.等权威期刊发表论文30余篇,授权专利10余项,主持国家自然科学基金项目2项,中央高校科研业务费2项。
刘遵峰,南开大学教授,国家杰出青年基金获得者。研究方向为柔性智能高分子纤维材料,包括高强韧人造蜘蛛丝、人工肌肉、柔性电子、柔性制冷等。在 Science , Nat. Commun., Adv. Mater.等国际学术 SCI 期刊上发表研究论文 100 余篇。其中2015年关于可拉伸导体的研究工作被美国《Discover Magazine》评选为2015年度全球TOP100重大科学发现;2019年关于“扭热制冷”的工作发展了逆转制冷新方法,大幅提高了制冷效率;研发的水凝胶纤维人造蜘蛛丝强度与韧性性能接近天然蜘蛛丝;基于多种纤维材料等发展了多种智能织物。发展了基于零泊松比褶皱结构的弹性导体,构建了多层次协同作用的模拟神经传导、应变传感、驱动为一体的人工肌肉纤维。 多篇关于柔性健康监测的文章被选为封面文章,受邀撰写多篇综述,授权中国专利8余项,在多个国内外学术会议做邀请报告40余次。
课题组主页:https://liuzunfeng.nankai.edu.cn




